THYMIO II⚓

Programmation visuelle ASEBA⚓
Programmation Blockly ASEBA⚓
Programmation SCRATCH⚓
Comment programmer Thymio II avec Scratch ?⚓
Procédure :
1. Télécharger la version hors-ligne (offline) de Scratch 2 (explications en anglais) et l'installer.
https://scratch.mit.edu/scratch2download
Tutoriel vidéo de l'installation fait par Techykids : http://www.techykids.com/scratch-with-thymio/
2. Télécharger et décompresser le fichier ASEBASCRATCH (c'est ce qui fait communiquer Scratch et Thymio)
https://github.com/davidjsherman/inirobot-scratch-thymioII/releases/tag/v0.7.3-alpha
Choisir le fichier Scratch2-ThymioII-0.7.3 (pour mac ou pour Windows) :
3. Si les logiciels du Thymio ne sont pas déjà installés, les télécharger et les installer : https://www.thymio.org/fr:start
Utilisation :
1. Brancher le robot (fil branché sur un port usb ou en sans fil avec le dongle dans un port usb)
2. Ouvrez le répertoire "Scratch2-ThymioII-0.7.3", ouvrir le fichier Scratch2-ThymioII
3. Lancer le logiciel Scratch 2 à partir d'un exemple (voir répertoire exemples).
4. Programmer le robot en utilisant notamment les blocs supplémentaires Scratch dédiés au Thymio. Voir description dans le fichier PDF :
On peut aussi ouvrir dans Scratch des exemples fournis dans le pack installé à la 2ème étape. Certains exemples avancés montrent une synchronisation possible entre la scène Scratch et le robot physique.
Exemples d'utilisation 'un robot en lien avec l'art⚓
customiser Thymio et programmer⚓
Halloween⚓
Customisez Thymio et programmez-le pour qu'il ait le comportement adéquat
Araignée⚓

Fais tisser des toiles à ton araignée! Tout d'abord, place un stylo sur son dos. Ensuite, sélectionne le mode violet et dirige la avec une télécommande! Si tu veux lui faire tisser des toiles plus complexes en créant un programme en spirale par exemple...
Chauve-souris⚓

Julie peut battre des ailes !
Utilise simplement le mode violet et une télécommande (si tu en as une) pour la diriger. Aide-la à voler en la prenant dans tes mains!
Tu peux aussi être plus créatif. Par exemple, si ta chauve-souris dort, fait en sorte qu'elle se réveille et avance lorsque tu passes ta main au-dessus de sa tête. Tu peux même la faire crier avec la carte son!
Voici le programme :

Fantôme⚓

Avec le fantôme c'est facile!
Utilises le mode violet avec une télécommande pour diriger ton fantôme et faire peur à tes voisins!
Loup garou⚓

Attention loup-garou méchant!
Lorsque tu vas mettre le mode vert à ton robot, le mode amical habituel va se transformer en mode agressif... Relève la mâchoire de ton loup afin que ses dents ne soient pas devant les capteurs. Ensuite, essaie d'approcher ta main si tu l'oses!
Vampire⚓

René dort dans son cercueil. Avec VPL avancé, trouve le moyen de le réveiller en sursaut lorsqu'on cogne sur le couvercle !
Voici le programme :
Zombie⚓

Programme ton robot avec VPL avancé pour qu'il avance lorsqu'il est droit (avec les capteurs qui sont contre le sol) et qu'il s'arrête quand il tombe sur le dos.

Banquise⚓
Customisez Thymio et programmez-le pour qu'il ait le comportement adéquat
Manchot⚓

Mets en route le mode de base violet pour faire avancer ton manchot! Tu peux utiliser une télécommande pour le commander à distance.
Attention! Pour que ton manchot avance, il faut que les roues du Thymio aillent en arrière!
ours⚓

Aide ton ours polaire à avancer sur son iceberg! Pour cela, utilise sa patte avant gauche comme guide. Lorsqu'elle passe devant un capteur, elle indique au Thymio où se diriger. À toi de jouer!
Voici le programme :

Orque⚓

Apprend à ton orque à poursuivre les otaries! Construis lui un parcours en ligne noire avec du scotch ou un marqueur noir, et programme le pour qu'un des capteurs sol suive cette ligne. Avec l'autre capteur, fais lui faire un son lorsqu'il croise une otarie!
Voici le programme :

Thymio et le dessin⚓
Dessiner avec un crayon⚓
Le robot Thymio II dispose d'un trou central qui permet de placer un feutre, par exemple, pour faire des dessins. Il y a différents moyens de décider quoi dessiner. Une façon simple est de télécommander le robot (par la télécommande ou le clappement de main) pour lui faire dessiner ce que vous désirez. L'autre façon est de le programmer. Dans cette page on présente quelques exemples de programmes avec les dessins correspondants.
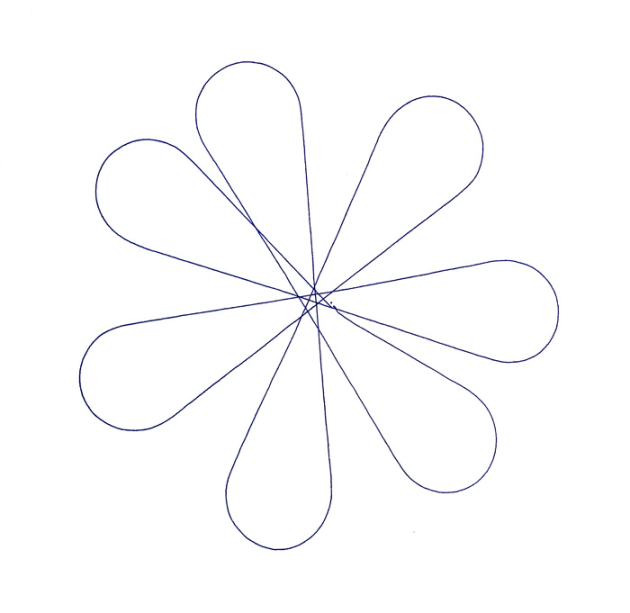
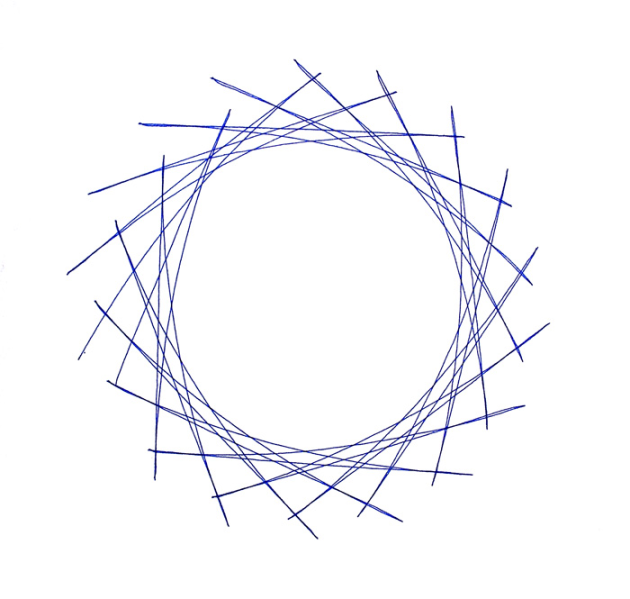
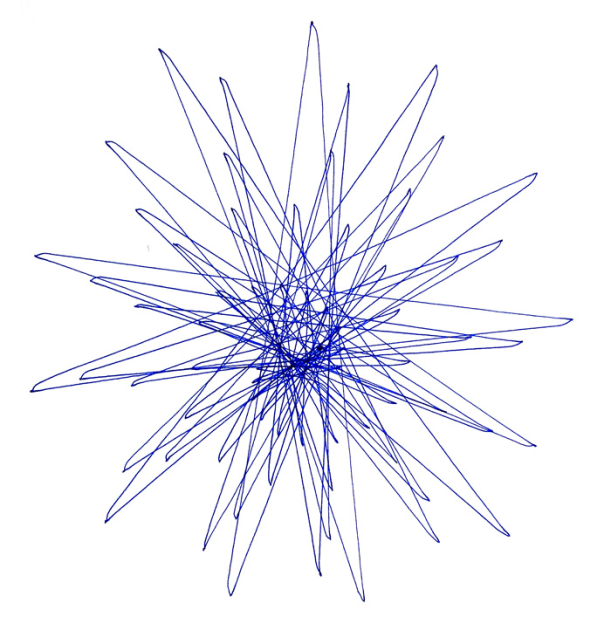
Dessiner une fleur⚓
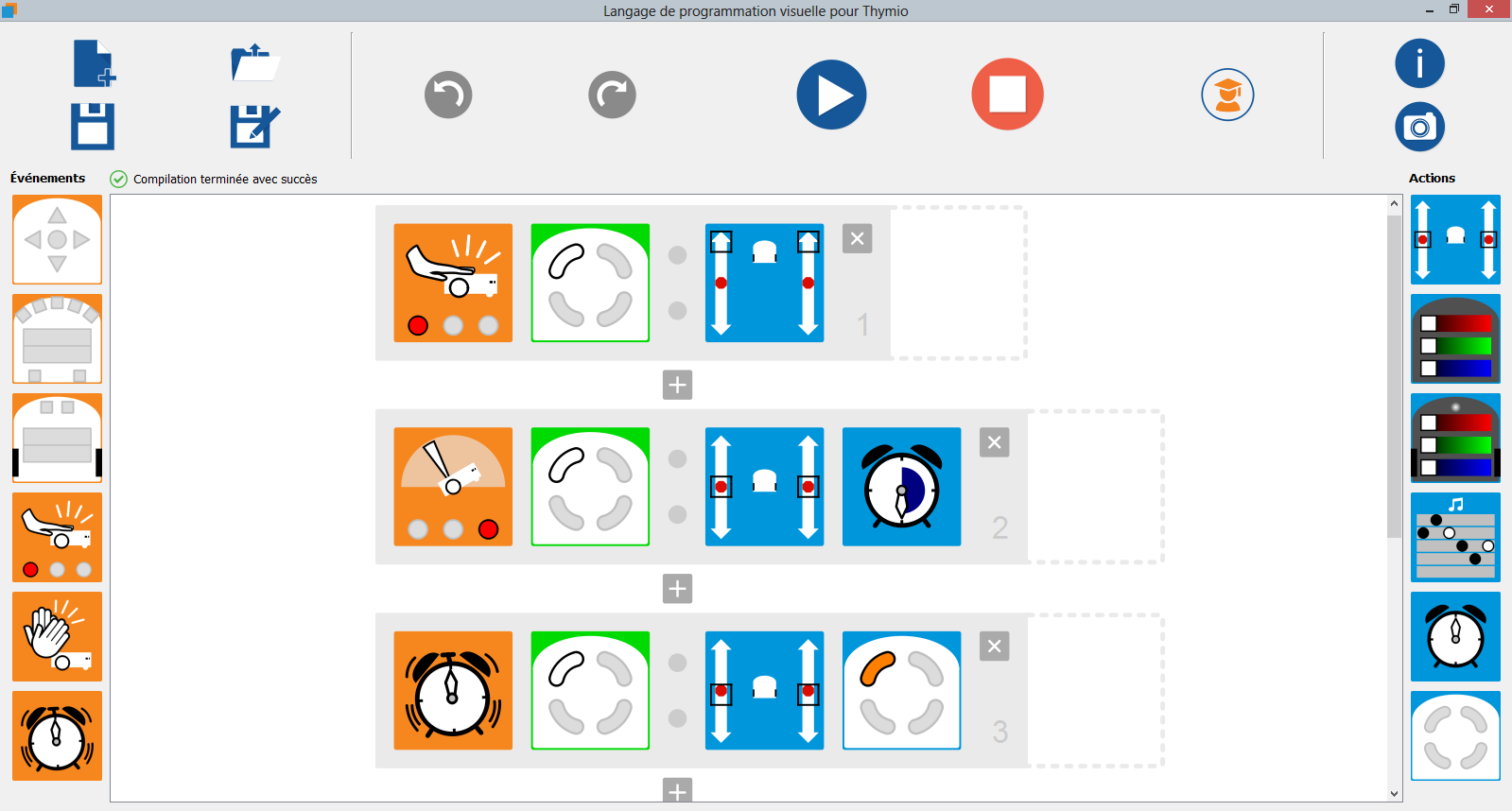
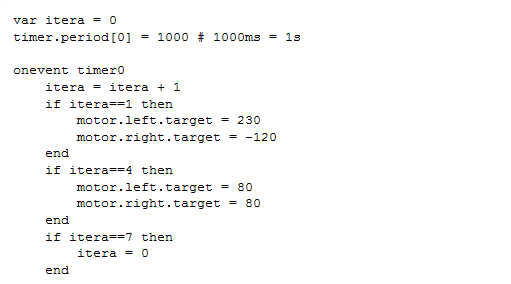
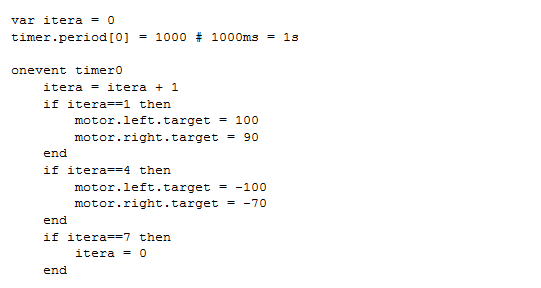
Voici un petit code qui prend l’événement de lecture de la température, qui arrive chaque seconde, et fait un comptage en boucle sur la variable itera, qui augmente de un à chaque seconde. Avec trois if on déclanche les différentes séquences (tourner lorsque itera est à 1, avancer quand itera est à 4) et on boucle avec le dernier if:
Autre dessin régulier⚓
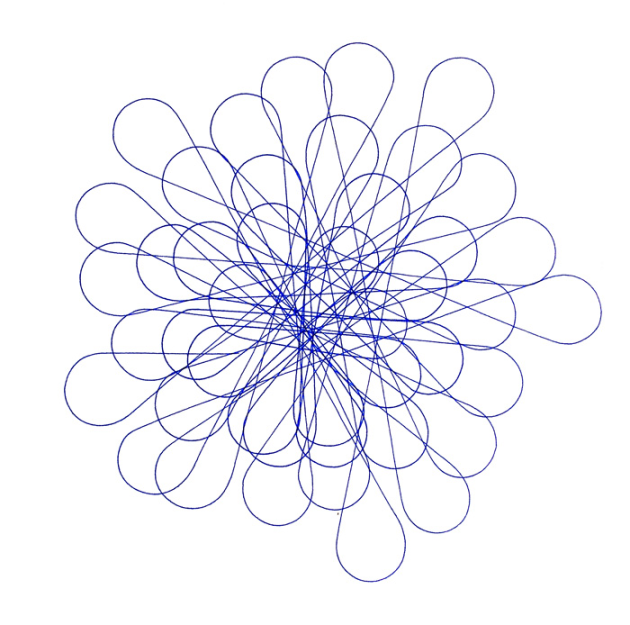
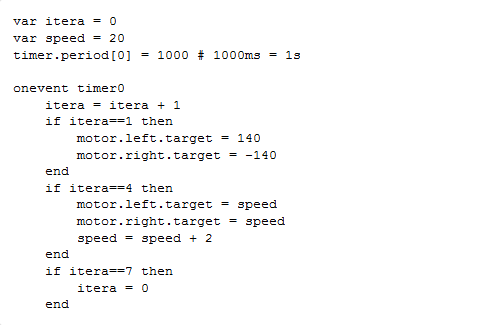
Fleur irrégulière⚓
SI on veut casser la régularité on peut ajouter une variable. Dans l'exemple ci-dessous on a ajouté une variable speed qui est incrémentée régulièrement et qui définit la longueur des bouts droits en augmentant la vitesse du robot:
Motif régulier avec variable⚓
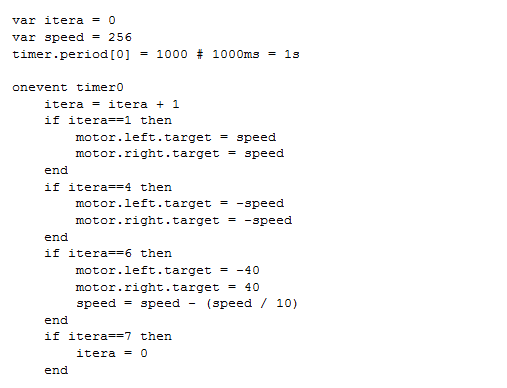
Spirale avancer et reculer⚓
Il est possible de faire des spirales plus explicites avec le code suivant, qui consiste à avancer, puis reculer seulement une partie, tourner et réduire la vitesse d'un dixième, et ainsi de suite:
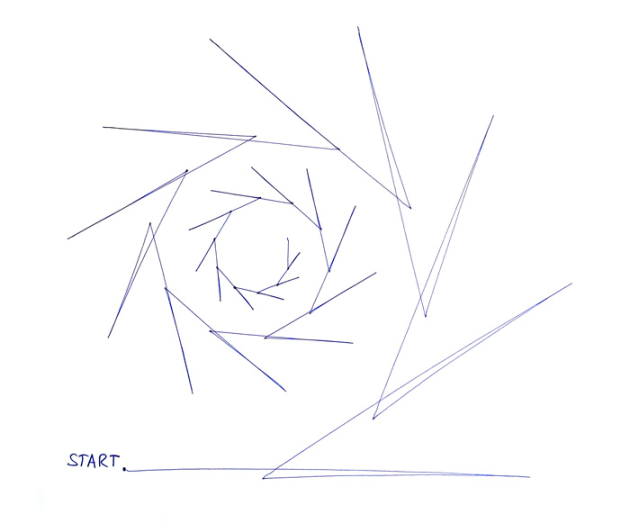
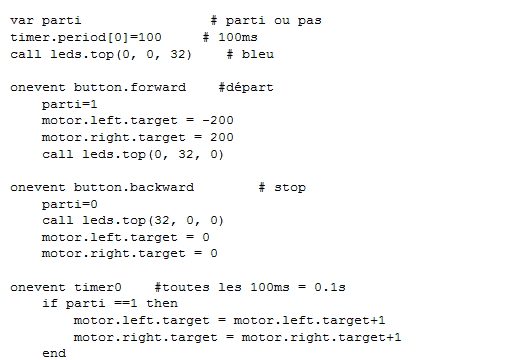
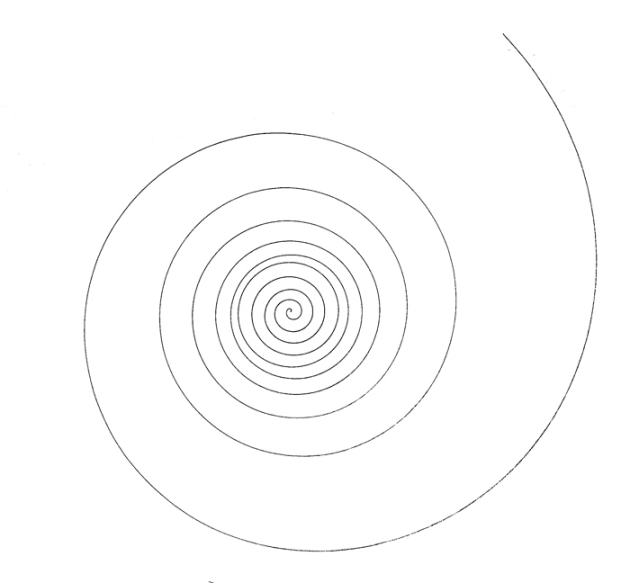
Spirale⚓
Avec un code qui permet de lancer et arrêter la spirale:
Dessiner une fractale⚓
Lightpainting et Thymio⚓
Programmation de Thymio par capteur de couleur et suiveur de ligne pour lui imposer un déplaceemnt précis et des couleurs spécifiques afin de réaliser un dessin en lightpainting.

BLUEBOT⚓

Programmation simple ...⚓
... en utilisant les boutons de commande directement sur le robot⚓

... avec l'application tablette Bluebot⚓
L'application est utilisable avec une tablette iOS (récente) ou Androïd, ou avec un ordinateur disposant du bluetooth.
Elle permet de
-piloter le robot
- créer et modifier des programmes envoyés ensuite au robot
- visualiser le programme et le parcours du robot
- ajouter des contraintes (enlever certains mouvements)
- mémoriser le parcours du robot
... avec la réglette de programmation⚓

- liée au robot par bluetooth sans paramétrage
- création du programme avec des cartes magnétiques, puis envoi au robot
- possibilité de vérifier, modifier, compléter son programme
- possibilité de combiner plusieurs réglettes pour allonger le programme
- instruction "boucle"
Sur le WEB⚓
mBot⚓
Introduction⚓
Au-delà de son apparence très sympathique et pratique (on voit les cartes, les microcircuits et les composants du robot, il intègre plusieurs capteurs d'origine) ; mBot est un robot robuste et facile à utiliser pour les enfants. Il permet d'aborder la programmation, l'électronique et la robotique assez facilement. Il s'agit d'une solution tout-en-un pour l'apprentissage robotique et conçu par STEM éducation.

C'est une carte Arduino qui est l'élément principal de ce robot.
Montage du robot⚓
mBot est vendu en kit à assembler.
Son assemblage prend environ 10 minutes.

Programmes pré-installés⚓
Lorsque vous allumez le robot mBot pour la première fois vous accédez directement aux programmes pré-installés. Vous pouvez passer d'un mode à l'autre grâce au petit bouton noir situé à l'avant gauche du robot (sur le dessus).
Mode "Contrôle par Infra-rouge"
C'est le premier mode accessible sur le robot, les LED sur la carte sont allumées en blanc.
Vous pouvez utiliser la télécommande Infra-rouge pour piloter le robot.
Mode "éviter les obstacle"
Dans ce mode les LED sont allumées en vert et si vous placez le robot sur un parcours avec des murs ou des obstacles, il va les éviter.
Mode "suiveur de ligne"
Dans ce mode des LED sont allumées en rouge et si vous placez le robot sur une carte avec des lignes noires, il les suivra automatiquement.
Pilotage et programmation de Mbot⚓
Pilotage ou programmation avec une tablette avec une tablette⚓
mBot intègre un module Bluetooth qui va permettre à la tablette de communiquer facilement avec le robot par appairage.
Applications de pilotage direct⚓
Pour Android et Ipad : Makeblock⚓

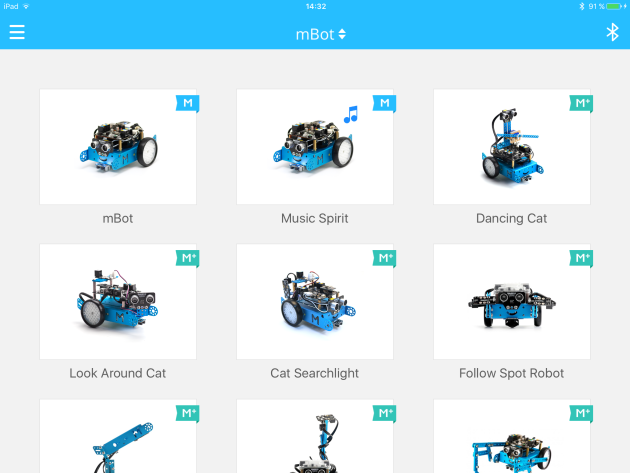
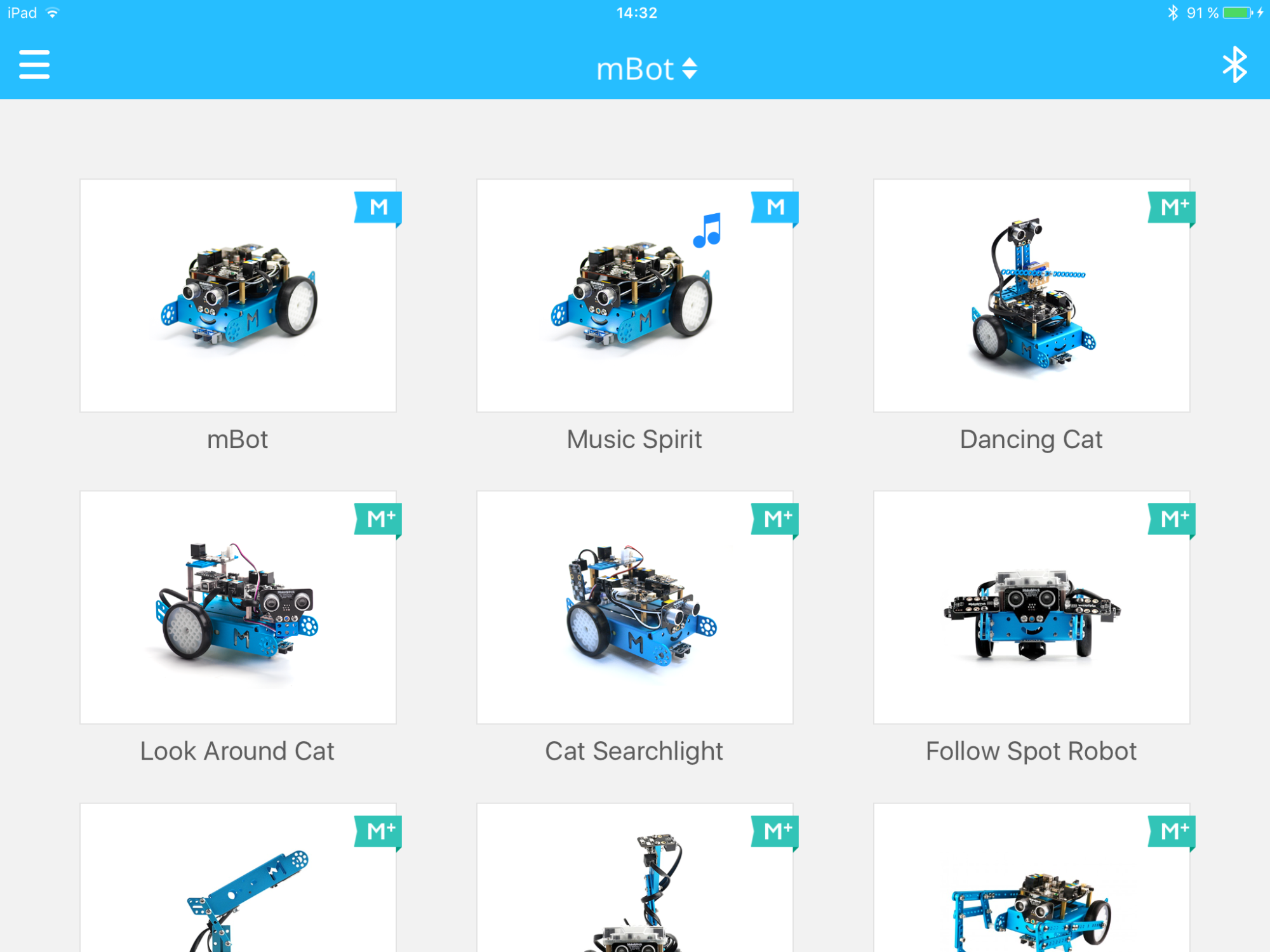
Cette application se connecte en Bluetooth avec votre robot :

Lorsque vous êtes connecté vous pouvez
soit sélectionner un projet dans la banque de projet disponibles et adaptés à votre robot (l'image du projet précise quel robot peut utiliser chaque projet):
Complément :
A partir d'un projet déjà disponible vous aurez la possibilité de le modifier (ajouter ou supprimer des commandes).
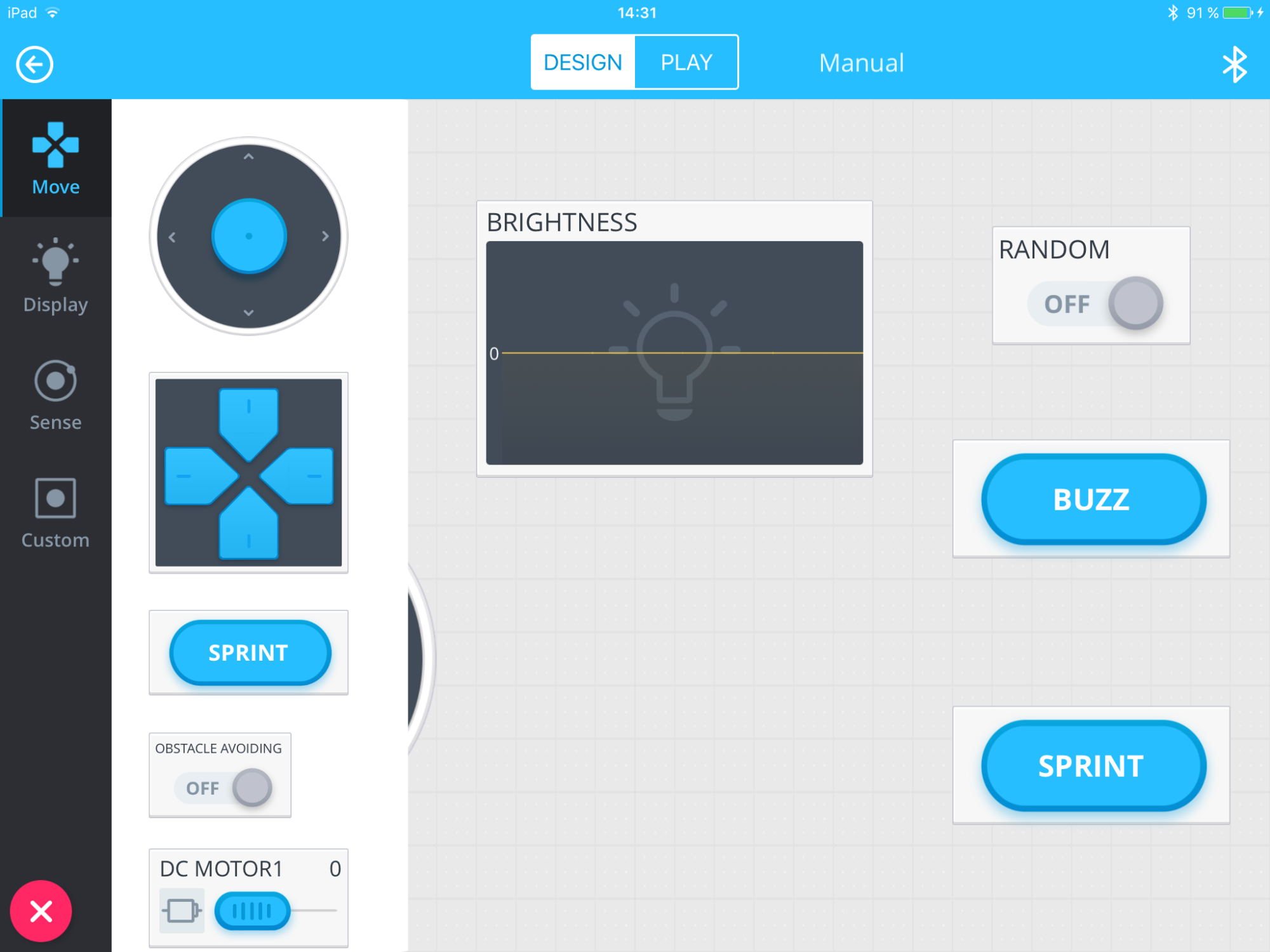
soit créer un projet personnel en mettant les commandes de votre choix disponible à partir de l'onglet "design".


Complément :
L'onglet "play" sert à commander le robot avec votre projet.
Voici un aperçu des commandes et des compteurs (indiquant les différentes valeurs des capteurs du robot) disponibles :



Pour Android uniquement : mBot⚓

Vous connectez votre robot via le Bluetooth :

Mode manuel⚓
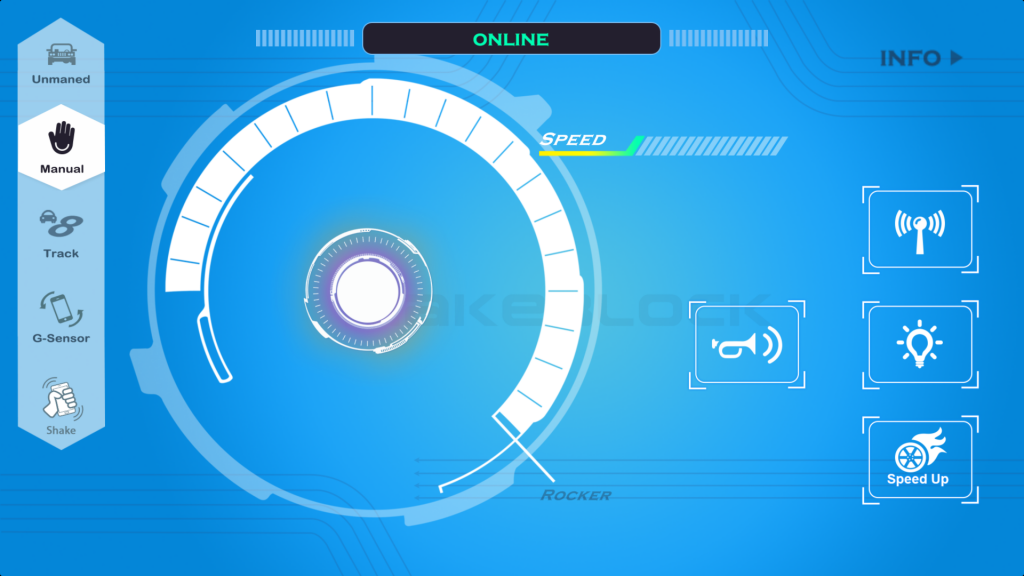
En posant le doigt sur la pastille au centre du cercle vous pouvez piloter le robot comme avec un joystick.
Choisissez ou changez de robot en accédant à la fenêtre de connexion Bluetooth grâce à ce bouton :

Lorsque que vous appuyez sur ce bouton mBot changera la couleur des LEDs :

Lorsque vous appuyez sur ce bouton mBot avancera à la vitesse maximale pendant 5 secondes :

Lorsque vous appuyer sur ce bouton le buzzer du robot se mettra à fonctionner :

Mode éviter les obstacles⚓
Lorsque vous choisissez ce mode, mBot bougera et évitera les obstacles automatiquement.

Mode suiveur de ligne⚓
Lorsque vous choisissez ce mode, mBot bougera et suivra la ligne noire automatiquement.

Mode de contrôle par gravité⚓
Lorsque vous choisissez ce mode, vous pouvez contrôler votre mBot en changeant l'inclinaison de votre tablette ou smartphone grâce au capteur de gravité de celui-ci.

Mode "secouer"⚓
En choisissant ce mode vous pouvez contrôler votre mBot en secouant votre smartphone ou votre tablette. Plus vous secouez plus le robot ira vite. choisisser la direction du robot (avance ou recule) et secouez votre appareil mobile pour donner de la vitesse au robot.

Applications de programmation⚓
pour Ipad uniquement
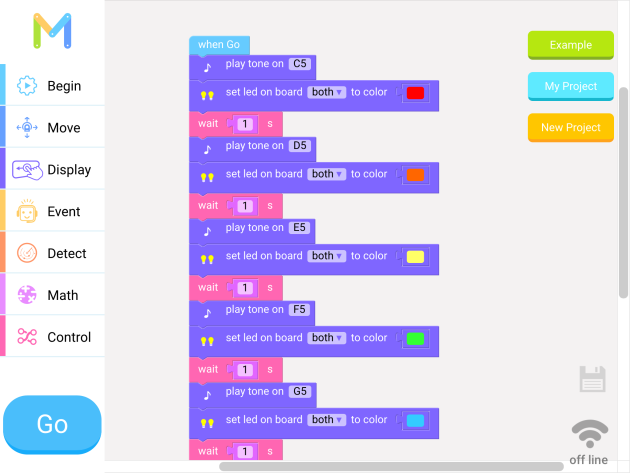
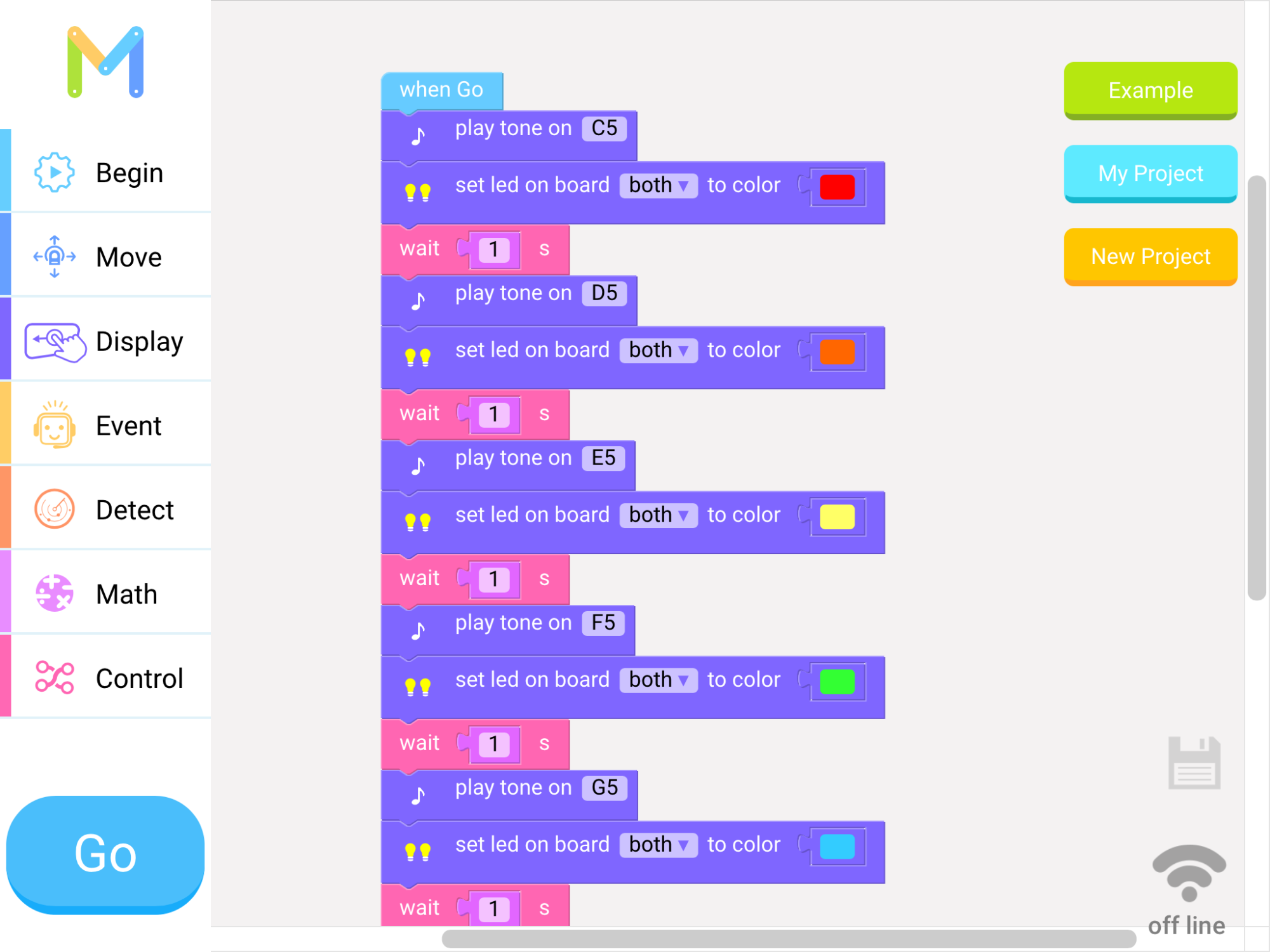
mBlockly for mBot

C'est une application qui permet de programmer le robot avec des blocs de programmation graphique.
Vous connectez votre robot via le Bluetooth :

Pour démarrer :
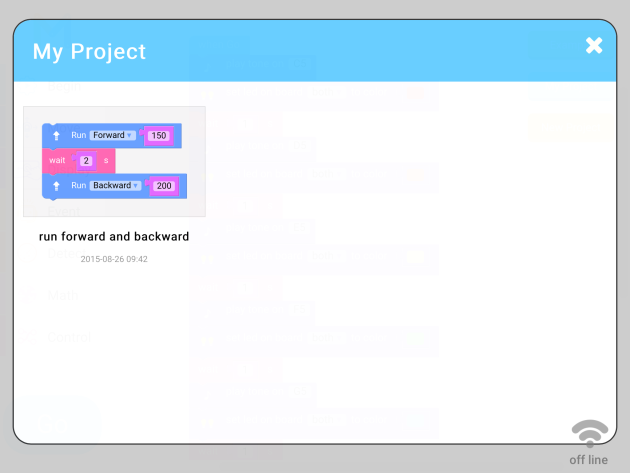
Vous pouvez ouvrir un exemple de programme :
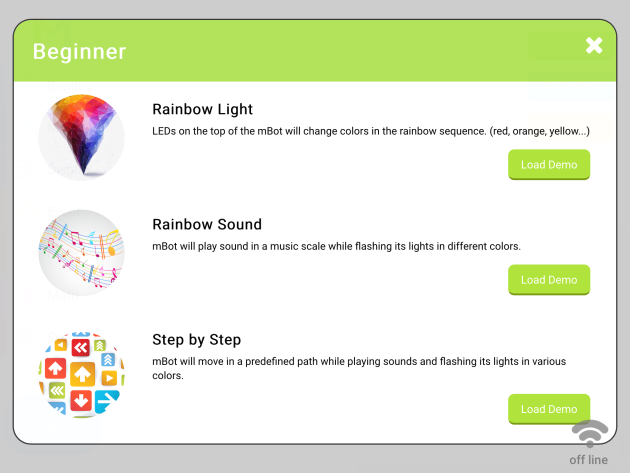
Rainbow light
Rainbow Sound
Vous avez la possibilité de modifier ces exemples de programmes si vous le souhaitez.


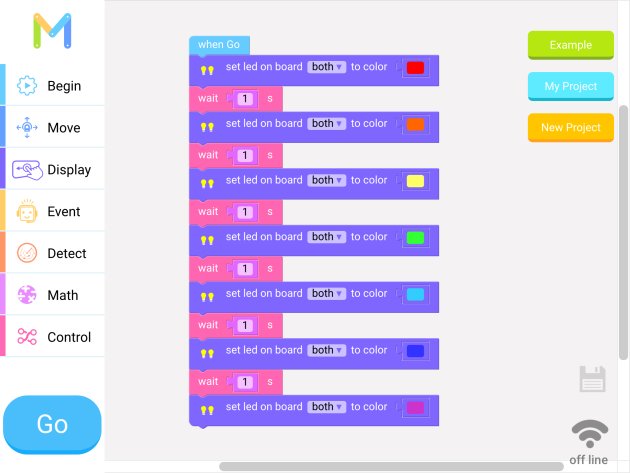
Vous pouvez ouvrir un programme vide et mettre les barrettes de votre choix :
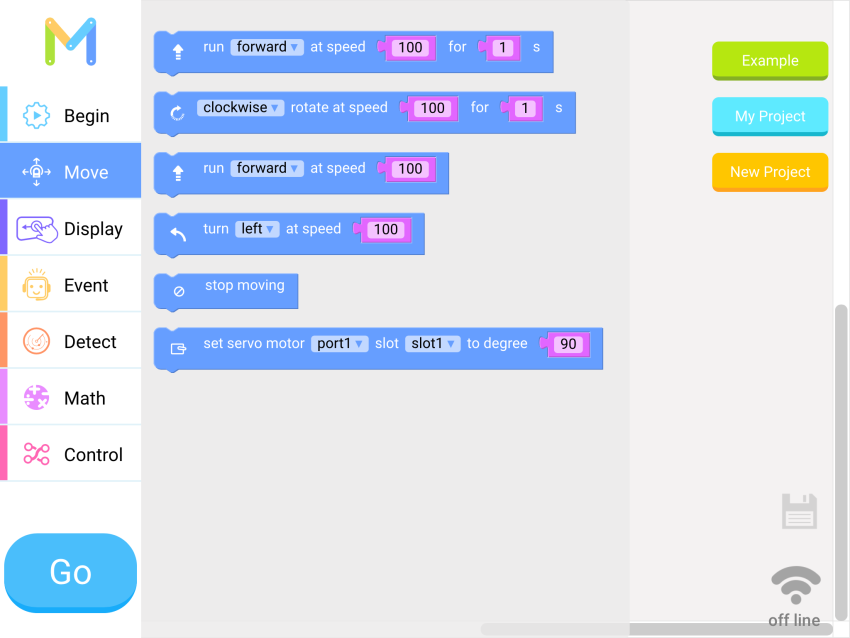
Voici un aperçu des commandes disponibles :







Aperçu des commandes blockly Vous pourrez ensuite sauvegarder votre programme et le retrouver dans la liste de vos projets.








Pilotage ou programmation avec un ordinateur⚓
Pour programmer mBot avec votre ordinateur il vous suffit d'installer le logiciel téléchargeable sur le site à l'adresse suivante:
http://www.mblock.cc/download/

Ce logiciel s'appelle mBlock et c'est un copie conforme de Scratch 2.0 sauf qu'il intègre des commandes supplémentaires dans l'onglet "pilotage" et qui vont nous permettre de faire les mises à jour du microprogramme de la carte de votre robot, de commander les capteurs, les LEDs et les moteurs du robot.
L'avantage lorsqu'on créé un programme avec mBlock c'est qu'il y a plusieurs options pour connecter son robot à l'ordinateur qui va permettre de le programmer :
Avec un câble USB (fournit avec le robot)
Par Bluetooth si le mBot est équipé du module Bluetooth et d'un bloc d'alimentation avec piles ou d'une batterie rechargeable.
Cette option offre un réel confort d'utilisation car le robot n'est plus limité en espace à cause du fil qui est assez court.

Sans fil avec le module 2.4 GHz wireless si il est inclue dans votre robot (clé USB blanche)

Commandes spécifique pour le robot et ses capteurs⚓

Le logiciel mBlock intègre en plus des commandes classique de scratch, un grand nombre de commandes et de variables adaptés au robot mbot, aux différentes options ou capteurs qui peuvent lui être ajoutés.
Exemples de programmes pour mBot⚓
Le robot suiveur de ligne⚓
Vidéo montrant comment créer le programme dans mBlock, son téléchargement et son exécution avec le robot.
Voici un aperçu du programme fini :

Carte avec ligne de parcours à suivre :
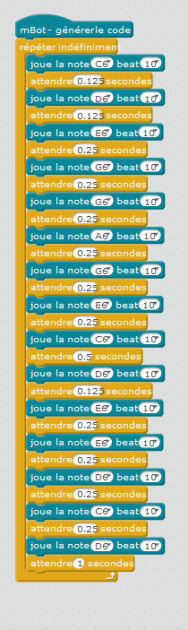
Le robot musicien⚓
Vidéo montrant comment créer le programme dans mBlock, son téléchargement et son exécution avec le robot.
Voici un aperçu du programme fini :
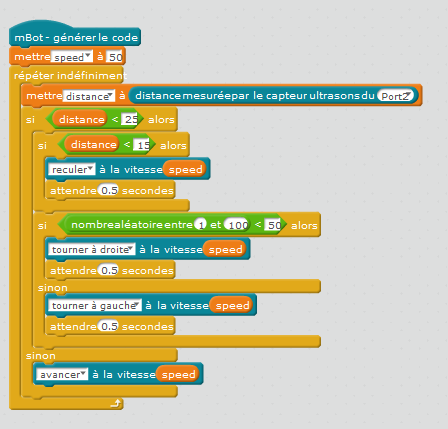
Le robot évitant les obstacles⚓
Vidéo montrant comment créer le programme dans mBlock, son téléchargement et son exécution avec le robot.
Voici un aperçu du programme fini :
DRONE PARROT AIRBORNE NIGHT⚓

Quels modes de contrôle ?⚓




Un projet drones et robots en SEGPA⚓
Fiche descriptive du projet : http://www.cndp.fr/agence-usages-tice/temoignages/initiation-a-la-programmation-avec-les-drones-1268.htm
Une plateforme de défis⚓

sur internet : http://defidrone.jimdo.com/
sur Twitter : https://twitter.com/defi_drone